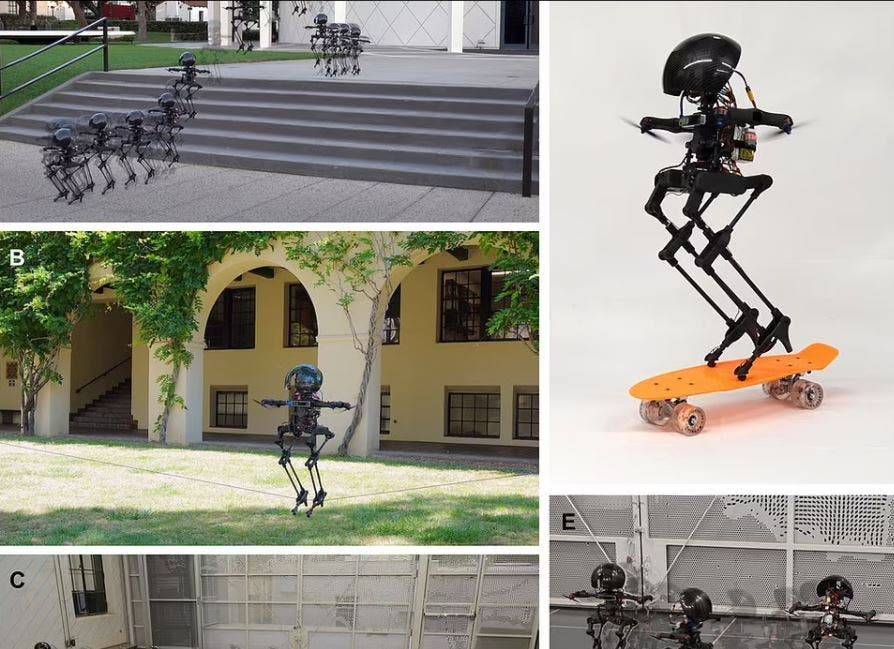
قد تبدو فكرة إنسان آلي يمكنه المشي على الحبل المشدود واستخدام لوح التزلج والطيران كمفهوم أحد ضروب الخيال العلمي، لكن ليوناردو أو الإنسان الآلي الهجين "ليو"، وهو ليس اختصارا لتدليل اليوناردو وإنما هي الأحرف الأولى لمفهوم Legs Onboard Drone، والتي تعني روبوت ذو قدمين يعمل كطائرة مُسيرة ذات دافعات لتحقيق التوازن والثبات.
من بقايا روبوتات ومُسيرات
وفقا لما نقلته "ديلي ميل" البريطانية عن دورية Science Robotics، تم بناء ليو من أجزاء من الروبوتات والطائرات المُسيرة، التي عثر عليها مهندسون من معهد كاليفورنيا للتكنولوجيا في باسادينا في مخازن حول مختبر المعهد.
إنسان آلي طائر مُسير
يتميز الروبوت ليو بالإضافة إلى تحسين الثبات عند المشي على الحبل، بوجود نظام للدفع بالاعتماد على مروحة ليتحول من الروبوت، الذي يبلغ ارتفاعه حوالي 75 سم، إلى درون يحلق في الجو. يقول فريق المهندسين إن الإنسان الآلي الطائر المُسير يمكن أن يضطلع يومًا ما بالمهام الروبوتية، التي يصعب حاليًا على الروبوتات والمركبات المُسيرة الأرضية أو الدرون القيام بها.
للبيئات الخطيرة
بالإضافة إلى التزحلق والتزلج، يقول مبتكرو الإنسان الآلي الهجين إن الروبوت يمكن أن يستخدم يومًا ما لأداء مهام صعبة للغاية حاليًا للطائرات المُسيرة أو الروبوتات أو البشر، مثل العمل في بيئات خطرة والتي يصعب الوصول إليها مثل وقت الحرائق في الغابات أو البراكين وما شابه.
يزن الإنسان الآلي الهجين "ليوناردو" ذو القدمين، نحو 2.5 كغم، وهو مستوحى من جحافل الطيور والحشرات القادرة على التبديل بسلاسة بين المشي أو الطيران أو حتى الزحف على الأرض.
بسرعة 20 سم/ثانية
قال المبتكرون إن ليو يستطيع المشي بسرعة حوالي 20 سم في الثانية، ولكن يمكن زيادتها من خلال الطيران المتقطع.
وأوضح الباحثون أنه "باستخدام الطيران المتقطع وهو قريب من الأرض، يمكنه الطيران بسرعة 3-5 متر / ثانية".
مستوحى من الطبيعة
وأوضح الباحثون أنهم استلهموا فكرتهم من الطبيعة، وتحديدًا من الطيور التي تستطيع أن تطير وترفرف بجناحيها ثم تقفز للتنقل عبر أسلاك خطوط الهاتف، في سلوك معقد ومثير للاهتمام عند التحول من المشي إلى الطيران وبالعكس.
تفاعلات فيزيائية على ارتفاعات عالية
ويقول سون جو تشونغ، باحث مشارك في الدراسة: إنه "ربما تكون التطبيقات الأكثر ملاءمةً للروبوت الهجين هي تلك التي تتضمن تفاعلات فيزيائية مع الهياكل على ارتفاعات عالية"، والتي تكون عادة أنشطة مثل فحص خط كهرباء بجهد عالي أو إصلاح أجزاء من محطة فضائية، يمكن أن تكون شديدة الخطورة بالنسبة للعاملين من البشر، أو تتطلب أنواعًا متعددة من الروبوتات الأرضية والجوية - لكن يمكن أن يؤدي ليو كافة المهام بمفرده، لأنه يجمع بين مميزات الروبوتات ذات قدمين، التي تتعامل مع تضاريس العالم الحقيقي باستخدام نفس نوع الحركة مثل البشر، بما في ذلك القفز والجري والتسلق، إلى جانب القدرة على تخطي التضاريس الوعرة لأنه يستطيع الطيران والتحليق.
أكثر كفاءة من الروبوت التقليدي
قال الباحث الرئيسي المشارك كيونام كيم: إن "الروبوتات ذات القدرة على الحركة متعددة الوسائط قادرة على التحرك عبر البيئات الصعبة بشكل أكثر كفاءة من الروبوتات التقليدية من خلال التبديل بشكل مناسب بين وسائل الحركة المتاحة". وأضاف أنه "على وجه الخصوص، يهدف الروبوت الهجين إلى سد الفجوة بين المجالين المتباينين للتنقل الجوي والمشي على الأرض، واللذين لا يتوافران معًا عادةً في الأنظمة الروبوتية الحالية."
يقول باتريك سبيلر، باحث مشارك في الدراسة: "استنادًا إلى أنواع العوائق التي تحتاج إلى اجتيازها، يمكن أن يختار ليوناردو استخدام إما المشي أو الطيران، أو مزج الاثنين حسب الحاجة. كما أنه يستطيع أداء مناورات حركية غير عادية تتطلب حتى عند البشر إتقانًا للتوازن، مثل المشي على الحبل المشدود والتزلج".
خطط لزيادة ذكاء ليو
وتقول إيلينا سورينا لوبو، باحثة مشاركة في الدراسة، يخطط الفريق لتحسين أداء "ليو" من خلال إنشاء تصميم ساق أكثر صلابة قادرًا على دعم المزيد من وزن الروبوت وزيادة قوة الدفع للمراوح، بالإضافة إلى أنهم يأملون في جعل ليو أكثر استقلالية حتى يتمكن الروبوت من فهم مقدار وزنه الذي تدعمه الأرجل وكم يحتاج إلى دعم بواسطة المراوح عند المشي على أرض غير مستوية.
يُخطط الباحثون أيضًا لتزويد الروبوت الهجين بخوارزمية مطورة حديثًا للتحكم في الهبوط كطائرة مُسيرة بالاعتماد على شبكات عصبية عميقة.
من خلال فهم البيئة بشكل أفضل، يمكن أن الروبوت الهجين قراراته الخاصة بشأن أفضل مزيج من المشي أو الطيران أو الحركة الهجينة التي يجب استخدامها للانتقال من مكان إلى آخر بناءً على ما هو أكثر أمانًا وما يستخدم أقل قدر من الطاقة.
تطبيقات للفضاء الخارجي
يحتوي جذع الروبوت الهجين على جميع البطاريات وأجهزة الاستشعار وقوة الحوسبة المطلوبة للتشغيل الذاتي الكامل، ويحتاج فقط إلى مزيد من قوة العقل عن طريق الخوارزميات.
ويتصور فريق المبتكرين أن الطائرات الدوارة المستقبلية للمريخ يمكن أن تكون مجهزة بمعدات هبوط ذات أرجل بحيث يمكن الحفاظ على توازن جسم هذه الروبوتات الجوية أثناء هبوطها على تضاريس منحدرة أو غير مستوية على أسطح الكواكب في الفضاء الخارجي، بما يضمن تقليل مخاطر الفشل في ظل ظروف الهبوط الصعبة.
العربية.نت



يلفت موقع Mustaqbal Web الإلكتروني إلى أنّه ليس مسؤولًا عن التعليقات التي ترده ويأمل من القرّاء الكرام الحفاظ على احترام الأصول واللياقات في التعبير.